Schnellwechsler-Serie – QCA-200 Ein Schnellwechsler am Ende eines Roboters


Hauptkategorie
Werkzeugwechsler für Roboter / Werkzeugwechsler am Roboterarm (EOAT) / Schnellwechselsystem / Automatischer Werkzeugwechsler / Schnittstelle für Roboterwerkzeuge / Roboterseite / Greiferseite / Werkzeugflexibilität / Schnellverschluss / Pneumatischer Werkzeugwechsler / Elektrischer Werkzeugwechsler / Hydraulischer Werkzeugwechsler / Präzisionswerkzeugwechsler / Sicherheitsverriegelungsmechanismus / Endeffektor / Automatisierung / Werkzeugwechseleffizienz / Werkzeugwechsel / Industrieautomation / Robotergestütztes Werkzeugsystem am Roboterarm / Modulares Design
Anwendung
End-of-Arm Tooling (EOAT) findet breite Anwendung in Branchen wie der Automobilindustrie, der Elektronikfertigung (3C), der Logistik, dem Spritzguss, der Lebensmittel- und Pharmaverpackung sowie der Metallverarbeitung. Zu seinen Hauptfunktionen zählen Werkstückhandhabung, Schweißen, Lackieren, Inspektion und schneller Werkzeugwechsel. EOAT steigert Produktionseffizienz, Flexibilität und Produktqualität erheblich und ist somit ein unverzichtbarer Bestandteil moderner Industrieautomation.
Besonderheit
Hochpräzision
Die Kolbenverstellung am Greifer dient der Positionierung und gewährleistet eine hohe Wiederholgenauigkeit. Tests mit einer Million Zyklen zeigen, dass die tatsächliche Genauigkeit deutlich über dem empfohlenen Wert liegt.
Hohe Festigkeit
Der Verriegelungskolben mit großem Zylinderdurchmesser zeichnet sich durch eine hohe Verriegelungskraft aus, und die Schnellspannvorrichtung des SCIC-Roboters bietet eine hohe Drehmomentfestigkeit. Beim Verriegeln treten keine Vibrationen aufgrund der hohen Bewegungsgeschwindigkeit auf, wodurch Verriegelungsfehler vermieden und eine wiederholgenaue Positionierung gewährleistet wird.
Hohe Leistung
Zur Gewährleistung des engen Kontakts des Signalmoduls werden ein Verriegelungsmechanismus mit mehrfach konischer Oberflächenkonstruktion, langlebige Dichtungskomponenten und eine hochwertige elastische Kontaktsonde eingesetzt.



Spezifikationsparameter
| Schnellwechsler-Serie | ||||
| Modell | Maximale Nutzlast | Gasweg | Verriegelungskraft bei 80 Psi (5,5 bar) | Produktgewicht |
| QCA-05 | 5 kg | 6-M5 | 620N | 0,4 kg |
| QCA-05 | 5 kg | 6-M5 | 620N | 0,3 kg |
| QCA-15 | 15 kg | 6-M5 | 1150N | 0,3 kg |
| QCA-25 | 25 kg | 12-M5 | 2400N | 1,0 kg |
| QCA-35 | 35 kg | 8-G1/8 | 2900N | 1,4 kg |
| QCA-50 | 50 kg | 9-G1/8 | 4600N | 1,7 kg |
| QCA-S50 | 50 kg | 8-G1/8 | 5650N | 1,9 kg |
| QCA-100 | 100 kg | 7-G3/8 | 12000N | 5,2 kg |
| QCA-S100 | 100 kg | 5-G3/8 | 12000N | 3,7 kg |
| QCA-S150 | 150 kg | 8-G3/8 | 12000N | 6,2 kg |
| QCA-200 | 300 kg | 12-G3/8 | 16000N | 9,0 kg |
| QCA-200D1 | 300 kg | 8-G3/8 | 16000N | 9,0 kg |
| QCA-S350 | 350 kg | / | 31000N | 9,4 kg |
| QCA-S500 | 500 kg | / | 37800N | 23,4 kg |

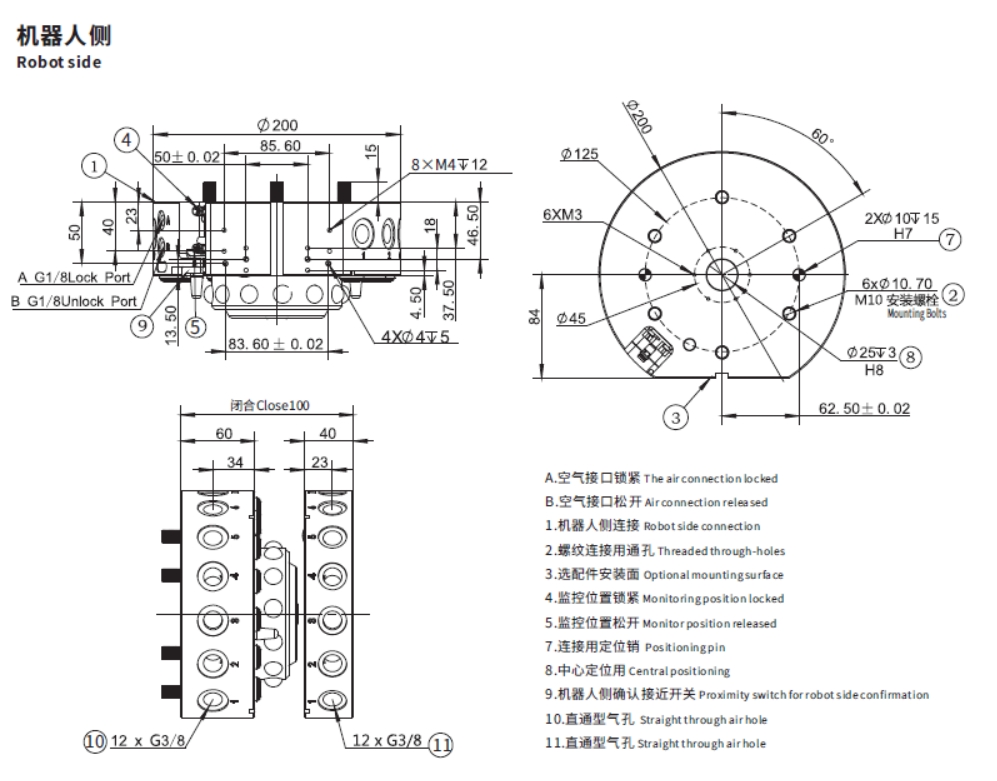
Roboterseite

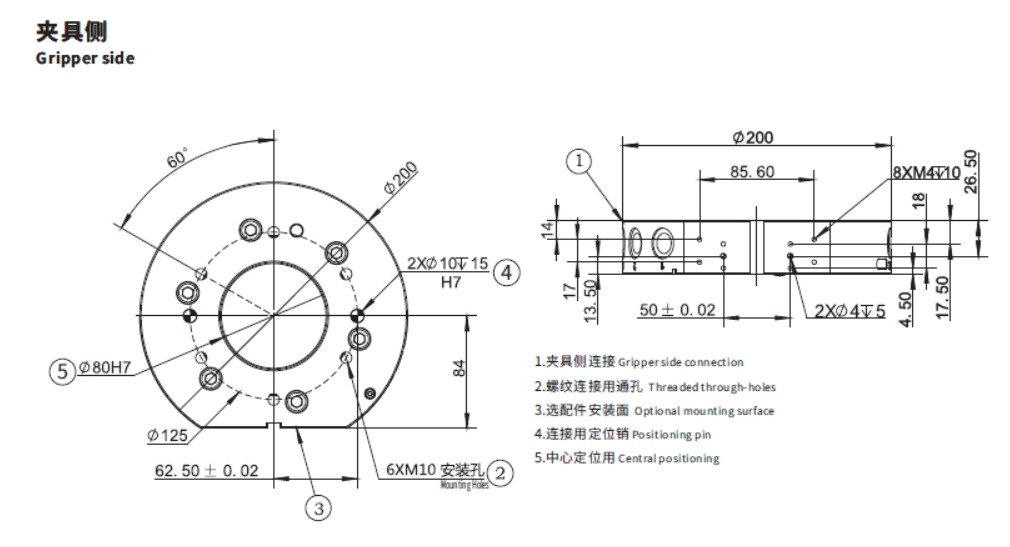
Greiferseite
Anwendbares Modul
Modultyp
| Produktname | Modell | PN | Betriebsspannung | Betriebsstrom | Anschluss | Anschluss PN |
| Roboterseitiges Signalmodul | QCSM-15R2 | 7.Y00468 | 24 V | 2,5 A | D-Sub15R2-1000① | 1.Y10080 |
| Greifer-Seitensignalmodul | QCSM-15G2 | 7.Y00469 | 24 V | 2,5 A | D-Sub15G2-1000① | 1.Y10081 |
| Roboterseitiges Signalmodul | QCSM-08R | 7.Y00477 | 380 V | 30A | 3108A22-23S② | 1.Y10710 |
| Greifer-Seitensignalmodul | QCSM-08G | 7.Y00478 | 380 V | 30A | 3108A22-23P② | 1.Y10711 |
| Roboterseitiges Signalmodul | QCSM-19R | 7.Y00954 | 220 V | 3A | MS3116F14-19S/-Y② | 1.Y11420 |
| Roboterseitiges Signalmodul | QCSM-19R | 7.Y00954 | 220 V | 3A | CMB08E-14-19S(072)SR-B② | 1.Y11863 |
| Roboterseitiges Signalmodul | QCSM-19R1 | 7.Y02123 | 220 V | 3A | MS3116F14-19S/-Y② | 1.Y11420 |
| Roboterseitiges Signalmodul | QCSM-19R1 | 7.Y02123 | 220 V | 3A | CMB08E-14-19S(072)SR-B② | 1.Y11863 |
| Greifer-Seitensignalmodul | QCSM-19G | 7.Y00955 | 220 V | 3A | MS3116F14-19P/-Y② | 1.Y11419 |
| Greifer-Seitensignalmodul | QCSM-19G | 7.Y00955 | 220 V | 3A | CMB08E-14-19P(072)SR-B② | 1.Y11864 |
| Roboterseitiges Signalmodul | QCSM-26R | 7.Y00464 | 220 V | 3A | MS3116F16-26S/-Y② | 1.Y11867 |
| Roboterseitiges Signalmodul | QCSM-26R | 7.Y00464 | 220 V | 3A | CMB08E-16-26S(072)SR-B② | 1.Y11865 |
| Greifer-Seitensignalmodul | QCSM-26G | 7.Y00465 | 220 V | 3A | MS3116F16-26P/-Y② | 1.Y11369 |
| Greifer-Seitensignalmodul | QCSM-26G | 7.Y00465 | 220 V | 3A | CMB08E-16-26P(072)SR-B② | 1.Y11866 |
| Greifer-Seitensignalmodul | QCSM-21/26G | 7.Y02117 | 220 V | 3A | MS3116F16-26P/-Y② | 1.Y11369 |
| Greifer-Seitensignalmodul | QCSM-21/26G | 7.Y02117 | 220 V | 3A | CMB08E-16-26P(072)SR-B② | 1.Y11866 |
| Roboterseitiges Signalmodul | QCSM-32R | 7.Y02095 | 220 V | 3A | MS3116F22-36S② | 1.Y13392 |
| Roboterseitiges Signalmodul | QCSM-32R | 7.Y02095 | 220 V | 3A | MS3118F22-36S② | 1.Y13393 |
| Greifer-Seitensignalmodul | QCSM-32G | 7.Y02096 | 220 V | 3A | MS3116F22-36P② | 1.Y13394 |
| Greifer-Seitensignalmodul | QCSM-32G | 7.Y02096 | 220 V | 3A | MS3118F22-36P② | 1.Y13395 |
① Die Kabellänge beträgt 1 Meter. ② Nur Verbindungsstück, kein Draht.
Pneumatisches Erweiterungsmodul
| Produktname | Modell | PN | Gaspfad | Gewindebohrung |
| Pneumatisches Erweiterungsmodul für die Roboterseite | QCAM-06G18R | 7.Y01015 | 6 | G1/8 |
| Pneumatisches Verlängerungsmodul für Greiferseite | QCAM-06G18G | 7.Y01016 | 6 | G1/8 |
| Pneumatisches Erweiterungsmodul für die Roboterseite | QCAM-06G18R-E | 7.Y01018 | 6 | G1/8 |
| Pneumatisches Verlängerungsmodul für Greiferseite | QCAM-06G18G-E | 7.Y01019 | 6 | G1/8 |
| Pneumatisches Erweiterungsmodul für die Roboterseite | QCAM-10M5R | 7.Y01053 | 10 | M5 |
| Pneumatisches Verlängerungsmodul für Greiferseite | QCAM-10M5G | 7.Y01054 | 10 | M5 |
| Pneumatisches Erweiterungsmodul für die Roboterseite | QCAM-14M5R | 7.Y01055 | 14 | M5 |
| Pneumatisches Verlängerungsmodul für Greiferseite | QCAM-14M5G | 7.Y01056 | 14 | M5 |
| Roboterseitig selbsternanntes pneumatisches Erweiterungsmodul | QCAM-06G18R-F | 7.Y02005 | 6 | G1/8 |
| Greiferseite selbsternanntes pneumatisches Verlängerungsmodul | QCAM-06G18G-F | 7.Y02006 | 6 | G1/8 |
| Pneumatisches Erweiterungsmodul für die Roboterseite | QCAM-04G38R | 7.Y02043 | 4 | G3/8 |
| Pneumatisches Verlängerungsmodul für Greiferseite | QCAM-04G38G | 7.Y02044 | 4 | G3/8 |
Hochfrequenzmodul-Typ
| Produktname | Modell | PN | Betriebsspannung | Betriebsstrom |
| Roboterseitiges Signalmodul | QCHFM-E14-C1R | 7.Y02003 | 1,4 kV | 5A |
| Greiferseitiges Signalmodul | QCHFM-E14-C1G | 7.Y02004 | 1,4 kV | 5A |
Signalmodul (Netzwerkkabelschnittstelle)
| Produktname | Modell | PN |
| Roboterseitiges Signalmodul | QCSM-RJ45-06R | 7.Y02007 |
| Greifer-Seitensignalmodul | QCSM-RJ45-06G | 7.Y02008 |
Servo-Leistungsmodul
| Produktname | Modell | PN |
| Roboterseitiges Servo-Leistungsmodul | QCSM-08R1 | 7.Y02080 |
| Servo-Leistungsmodul für Greiferseite | QCSM-08G1 | 7.Y02081 |
Servo-Signalmodul
| Produktname | Modell | PN |
| Roboterseitiges Servosignalmodul | QCSM-12R | 7.Y02082 |
| Servosignalmodul für Greiferseite | QCSM-12G | 7.Y02083 |
Selbstabdichtendes Flüssigkeitsluftmodul
| Produktname | Modell | PN |
| Roboterseitiges Signalmodul | QCWM-02R | 7.Y02049 |
| Greifer-Seitensignalmodul | QCWM-02G | 7.Y02050 |
Unser Unternehmen







