Greifer für kollaborative Roboter – ISC Inner Soft Clamp Cobot Arm Greifer



Hauptkategorie
Industrieroboterarm / Kollaborativer Roboterarm / Elektrischer Greifer / Intelligenter Aktor / Automatisierungslösungen / Cobot-Arm-Greifer / Soft-Greifer / Roboterarm-Greifer
Anwendung

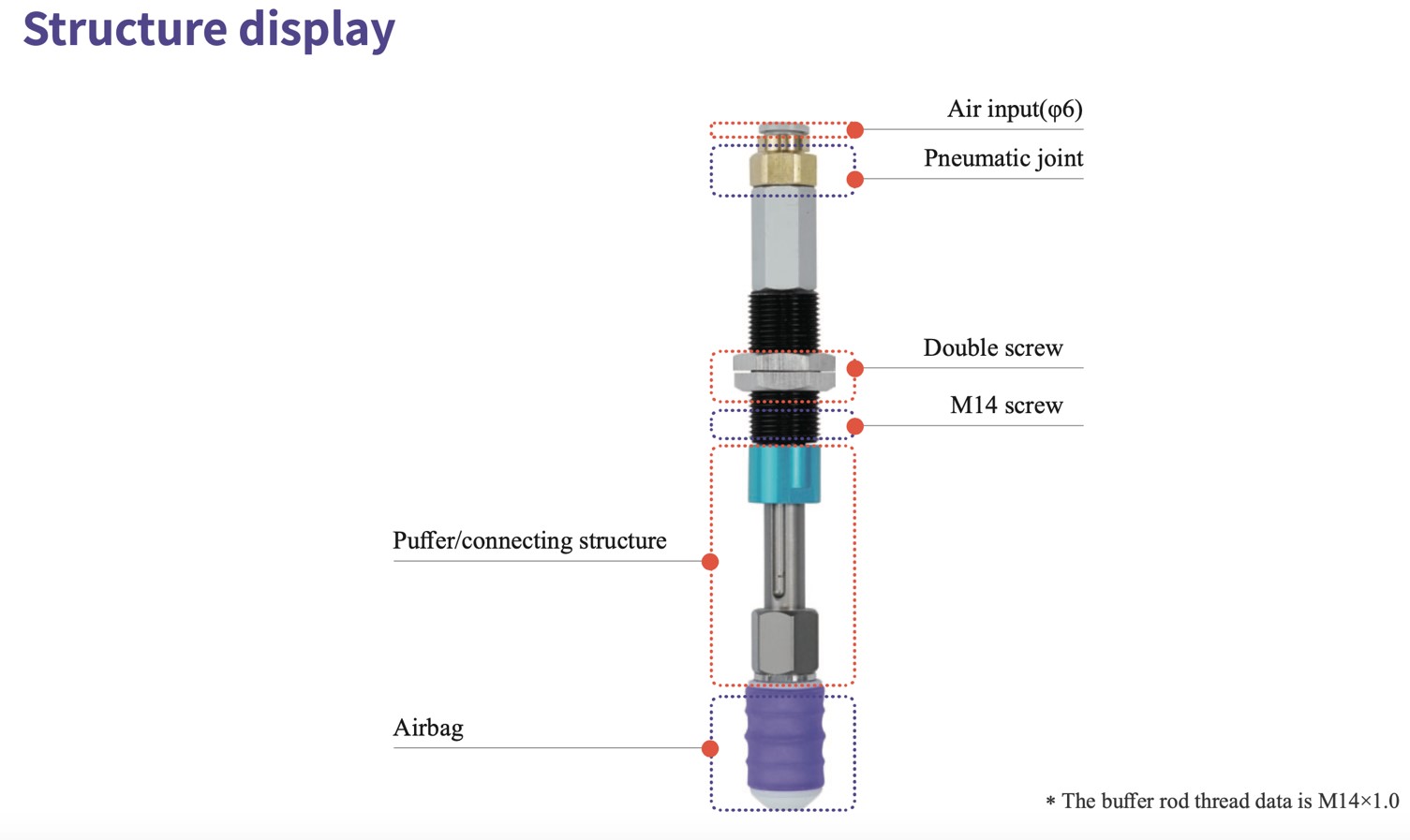
Die interne Stützklemme von ISC ist eine innovative, flexible Vorrichtung, deren Design die Verteidigungsmechanik von Kugelfischen nachahmt. Durch Aufblasen mit Luftdruck dehnt sich die Vorrichtung aus und gewährleistet so eine optimale interne Stützwirkung.
Da das Kontaktteil mit dem Werkstück aus weichem Silikonkautschuk besteht, bildet sich nach dem Aufbringen von Druck eine „Luftpolsterschicht“ zwischen der starren Stütze und der Kontaktfläche. Dadurch wird die Belastung gleichmäßig verteilt und das Werkstück vor Beschädigungen geschützt. Zusätzlich lässt sich der Luftdruck anpassen, um die Ausdehnung des Luftpolsters und die auf das Werkstück wirkende Belastung zu steuern und so die Weichheit des Greifsystems deutlich zu erhöhen.
Besonderheit

•Fahrmedien: saubere Luft
•Standardmäßige Lebensdauer: >100.000 Mal
•Maximale Betriebsfrequenz (U/min): 300
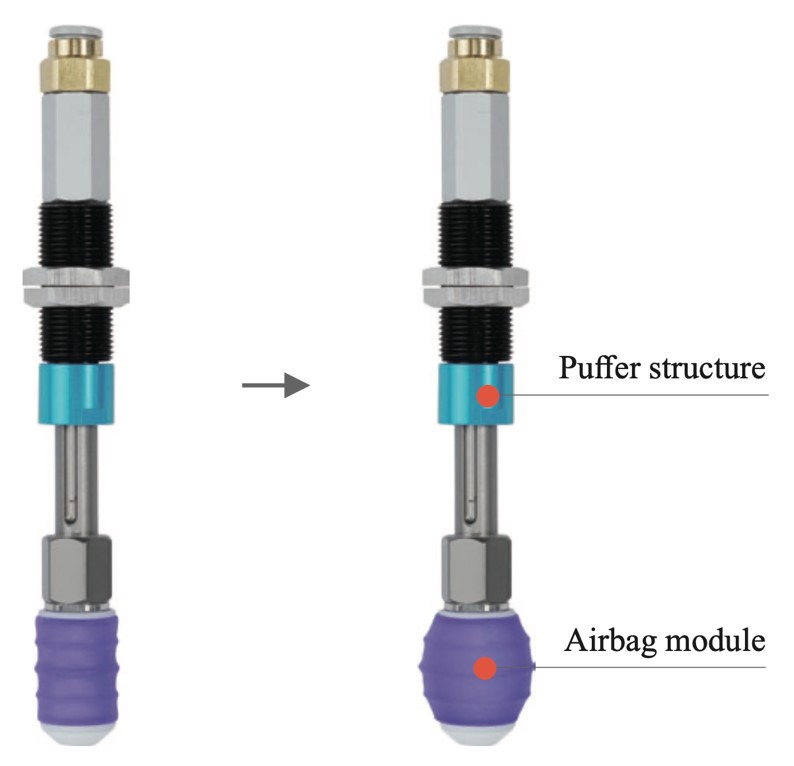
● Die interne Stützklemme verfügt über eine spezielle Airbag-Struktur und kann in Abhängigkeit vom Innendruck unterschiedliche Verformungen hervorrufen.
● Positiver Eingangsdruck: Die Vorrichtung fährt aus, stützt sich selbstadaptiv an der Innenfläche des Objekts ab und vollendet so den Griff.
● Unterdruckzufuhr: Die Vorrichtung stellt einen natürlichen Zustand dar und gibt die Objekte frei.
SFG-Softgreifer wurden mit erstklassigen kollaborativen Roboterarmen eingesetzt, darunter:

4-Achsen-Horizontalroboter (SCARA) Delta
Industrieroboterarm Nachi Fujikoshi
4-Achs-Parallelroboter (Delta) von ABB
6-achsiger kollaborativer Roboter UR
6-achsiger kollaborativer Roboter AUBO



Spezifikationsparameter
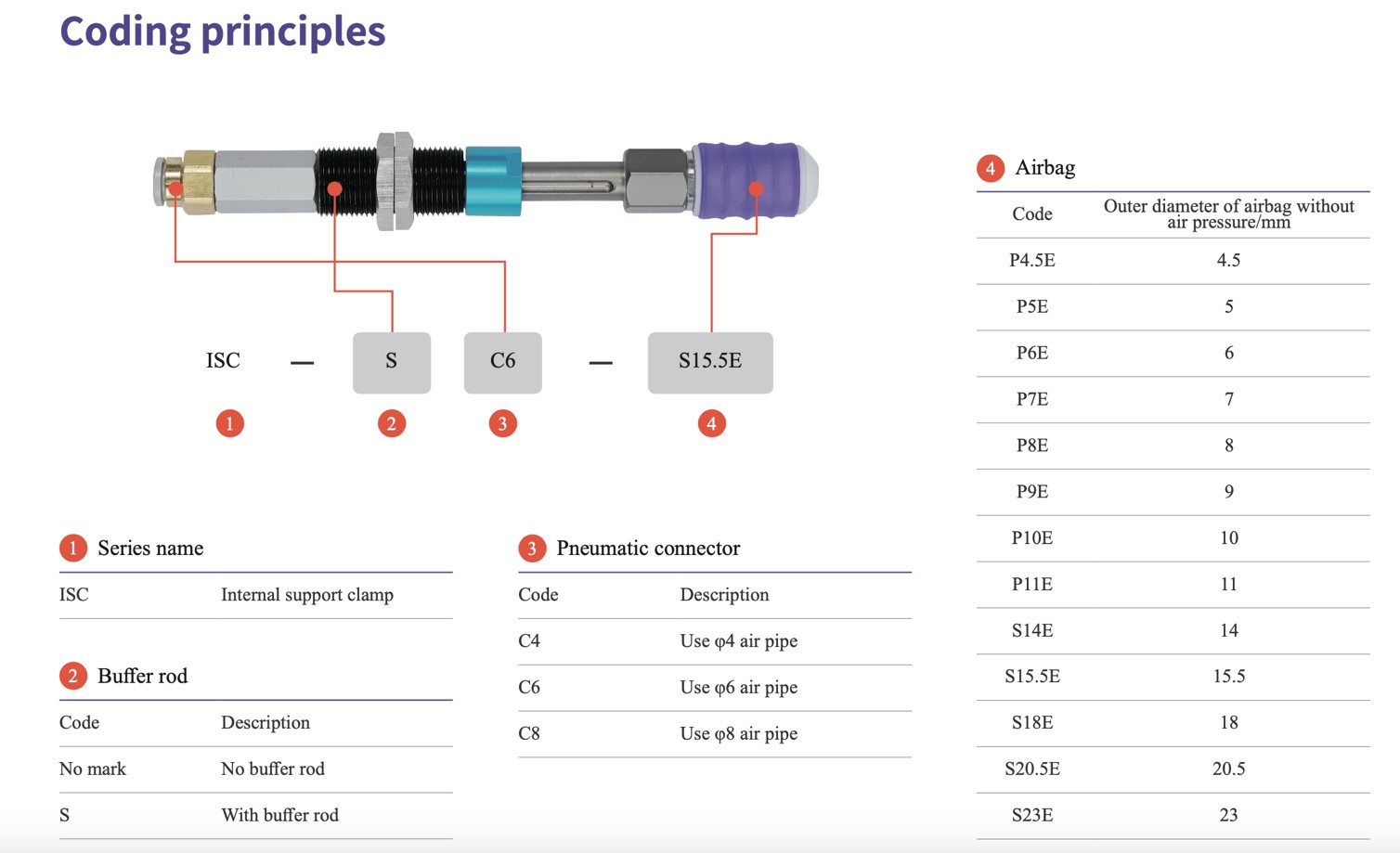
Die ISC-Airbag-Innenstützklemme ist eine innovative, flexible Vorrichtung, deren Design die Verteidigungsmechanik eines Kugelfisches nachahmt. Durch Aufblasen mit Druckluft dehnt sich die Klemme aus und gewährleistet so eine optimale Innenstützung. Da der Luftdruck präzise gesteuert werden kann, lässt sich auch die Haltekraft der Klemme am Werkstück kontrollieren, wodurch Beschädigungen minimiert werden.
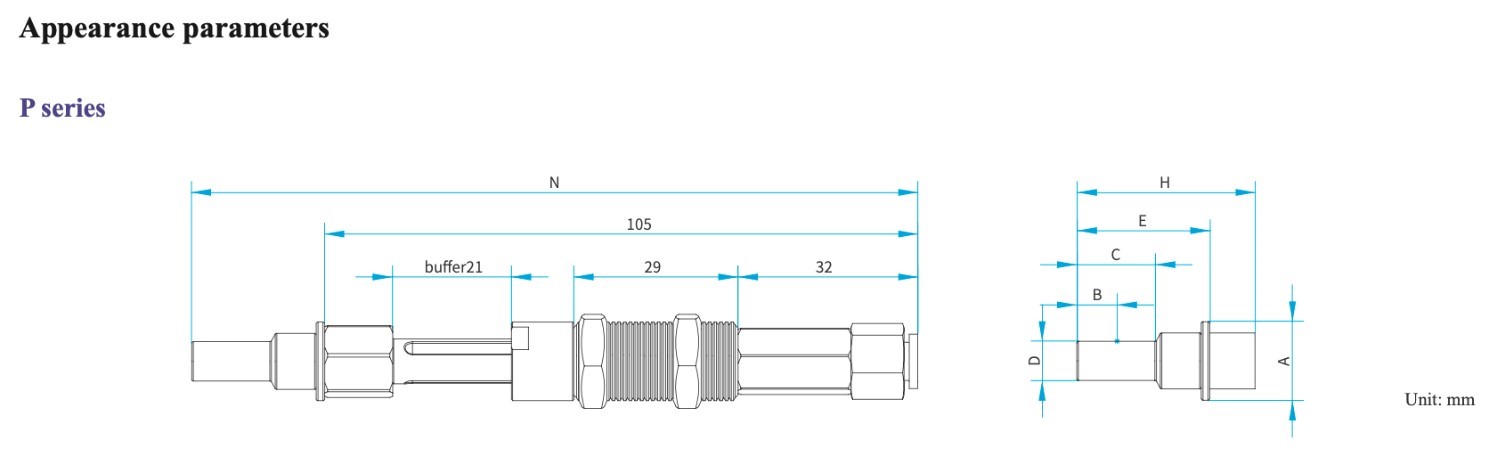
| Modell | Gesamthöhe des Airbagmoduls H | Kontaktflächendurchmesser D | Durchmesser des Bauteils A | Höhe vom Arbeitsdurchmesser bis zum Boden B | Höhe der effektiven Kontaktfläche C | Arbeitshöhe des Airbags Modul E | Gesamtlänge N |
| ISC-P4.5E | 25,5 | 4,5 | 14 | 4 | 8 | 17,5 | E+105 |
| ISC-P5E | 27,5 | 5 | 14 | 5 | 10 | 19,5 | E+105 |
| ISC-P6E | 30,5 | 6 | 14 | 6 | 12 | 22,5 | E+105 |
| ISC-P7E | 31,5 | 7 | 14 | 7 | 14 | 23,5 | E+105 |
| ISC-P8E | 31,5 | 8 | 14 | 7 | 14 | 23,5 | E+105 |
| ISC-P9E | 32,5 | 9 | 14 | 7,5 | 15 | 24,5 | E+105 |
| ISC-P10E | 32,5 | 10 | 14 | 7,5 | 15 | 24,5 | E+105 |
| ISC-P11E | 34,5 | 11 | 14 | 7,5 | 15 | 26,5 | E+105 |
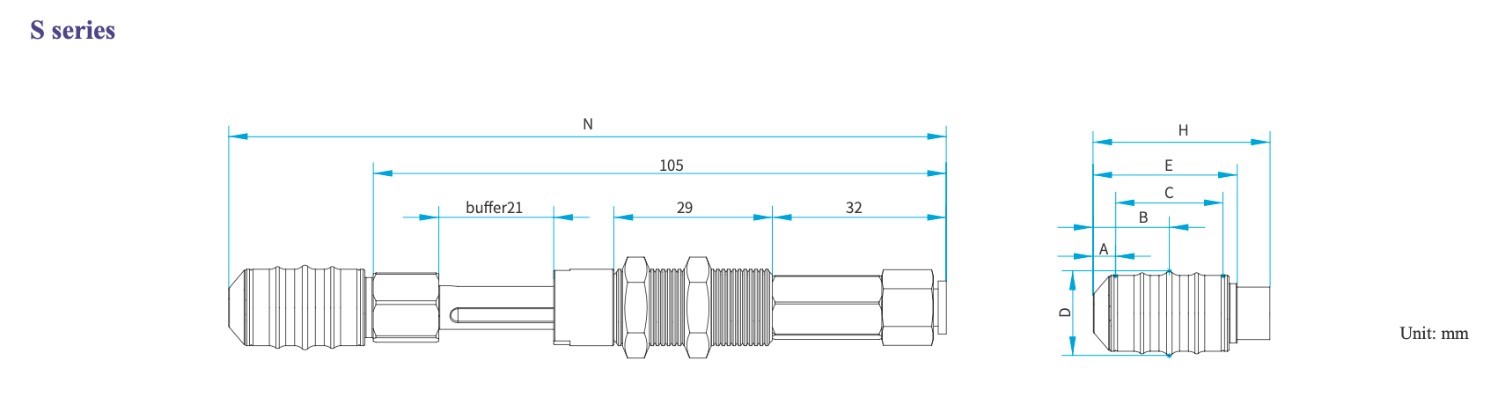
| Modell | Gesamthöhe des Airbagmoduls H | Kontaktflächendurchmesser D | Führungshöhe A | Höhe vom Arbeitsdurchmesser bis zum Boden B | Höhe der effektiven Kontaktfläche C | Arbeitshöhe des Airbags Modul E | Gesamtlänge N |
| ISC-S14E | 32,5 | 14 | 4 | 14 | 20 | 26,5 | E+105 |
| ISC-S15.5E | 32,5 | 15,5 | 4 | 14 | 20 | 26,5 | E+105 |
| ISC-S18E | 40,5 | 18 | 6 | 19 | 26 | 34,5 | E+105 |
| ISC-S20.5E | 40,5 | 20,5 | 6 | 19 | 26 | 34,5 | E+105 |
| ISC-S23E | 40,5 | 23 | 6 | 19 | 26 | 34,5 | E+105 |
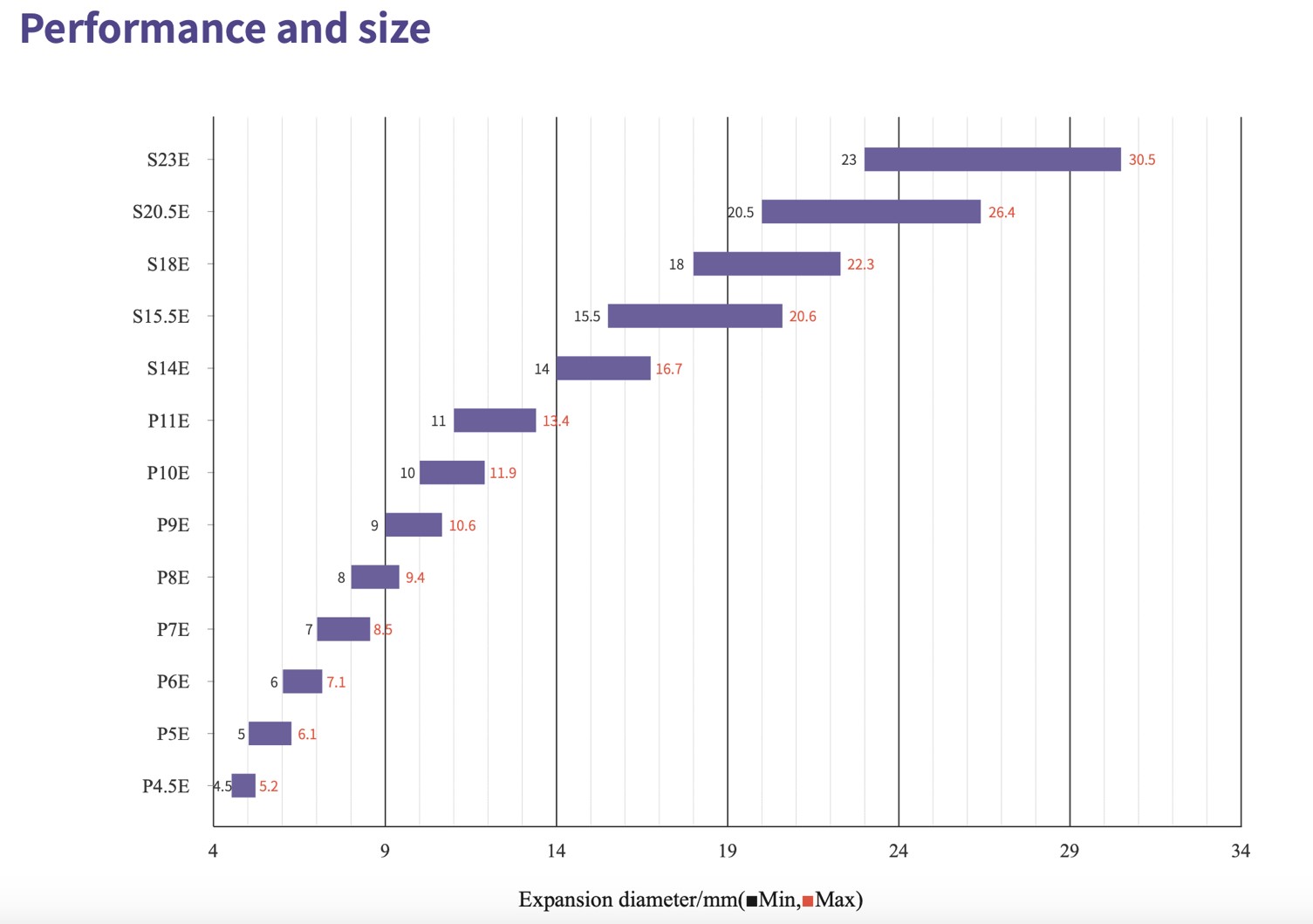
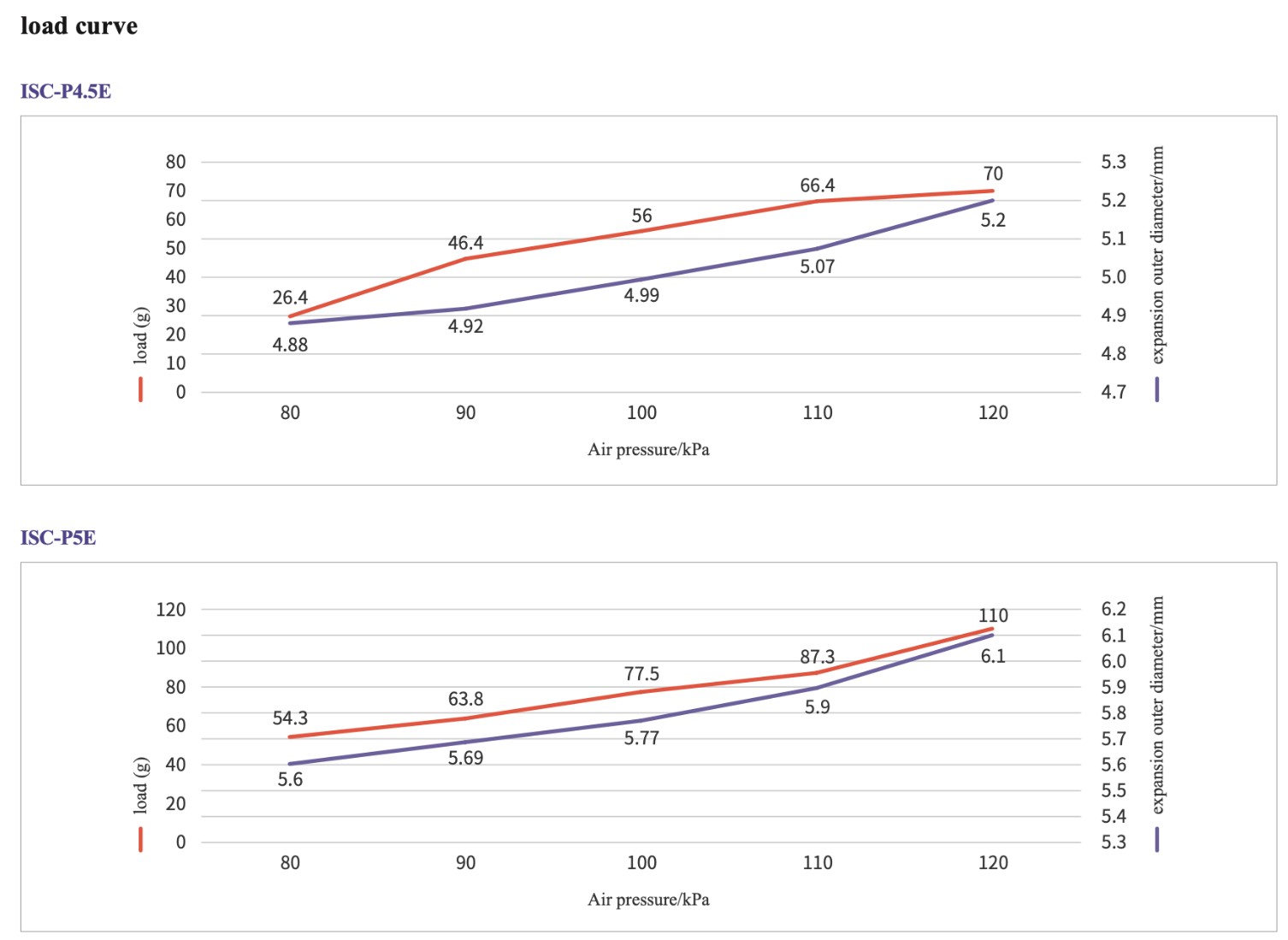
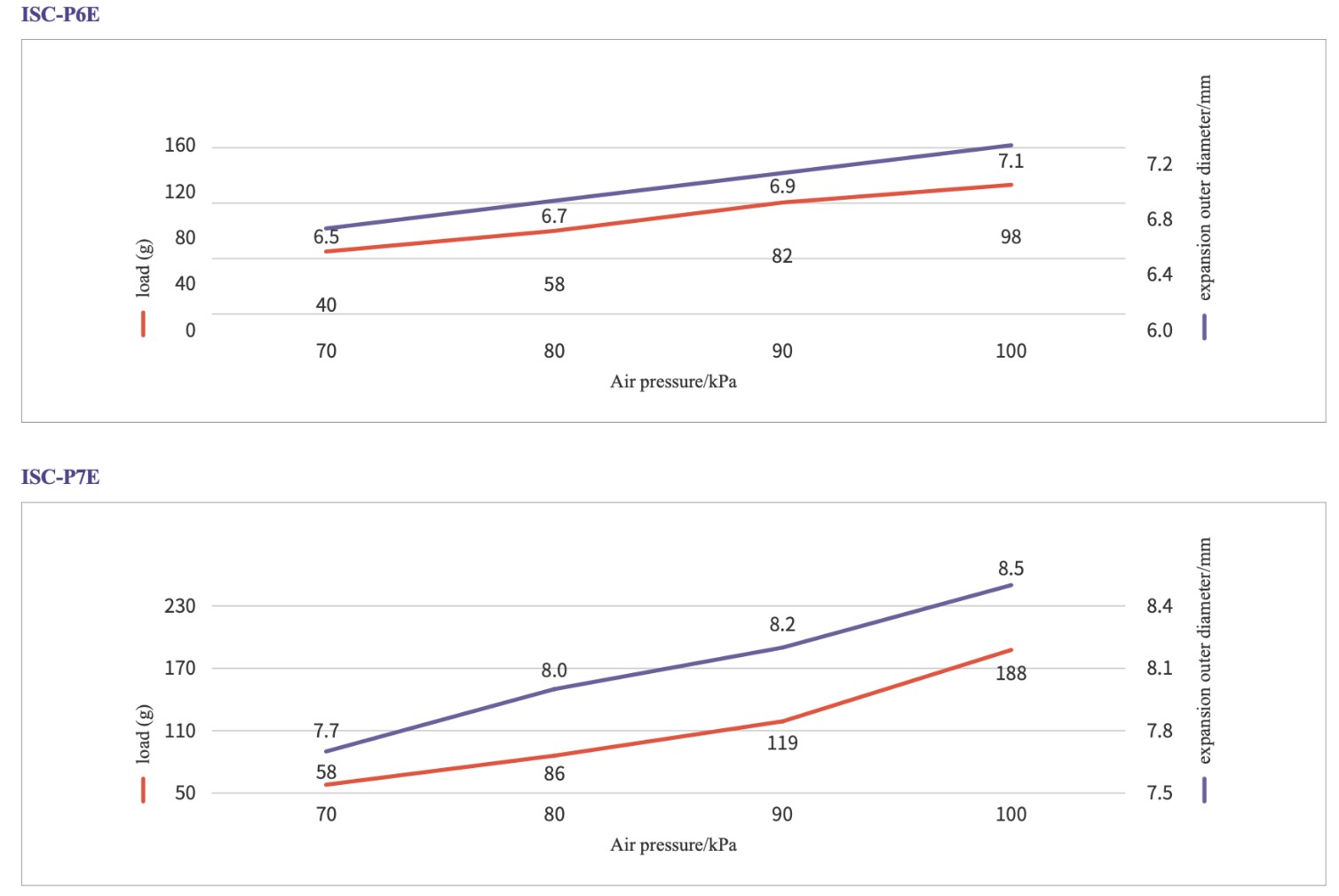
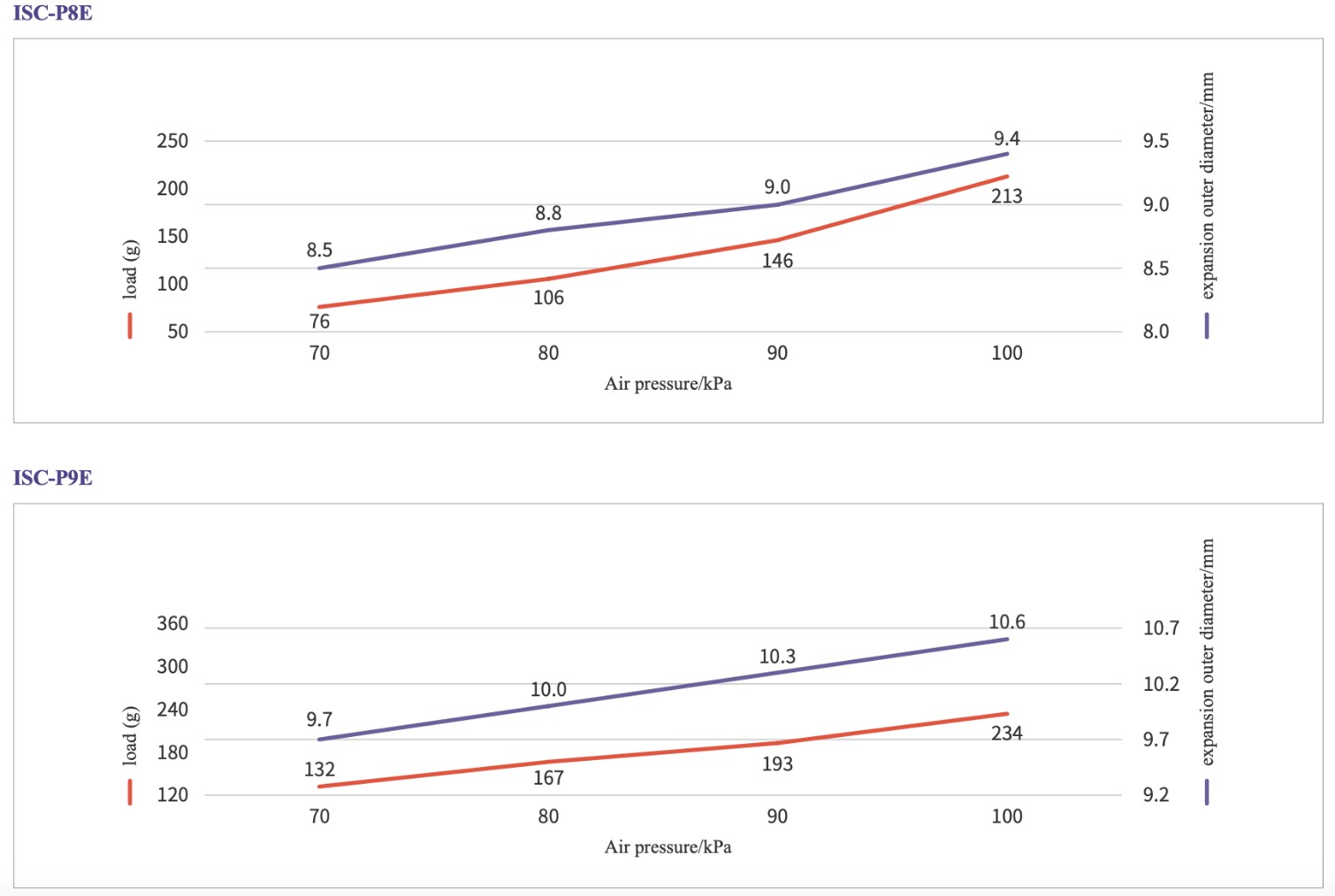
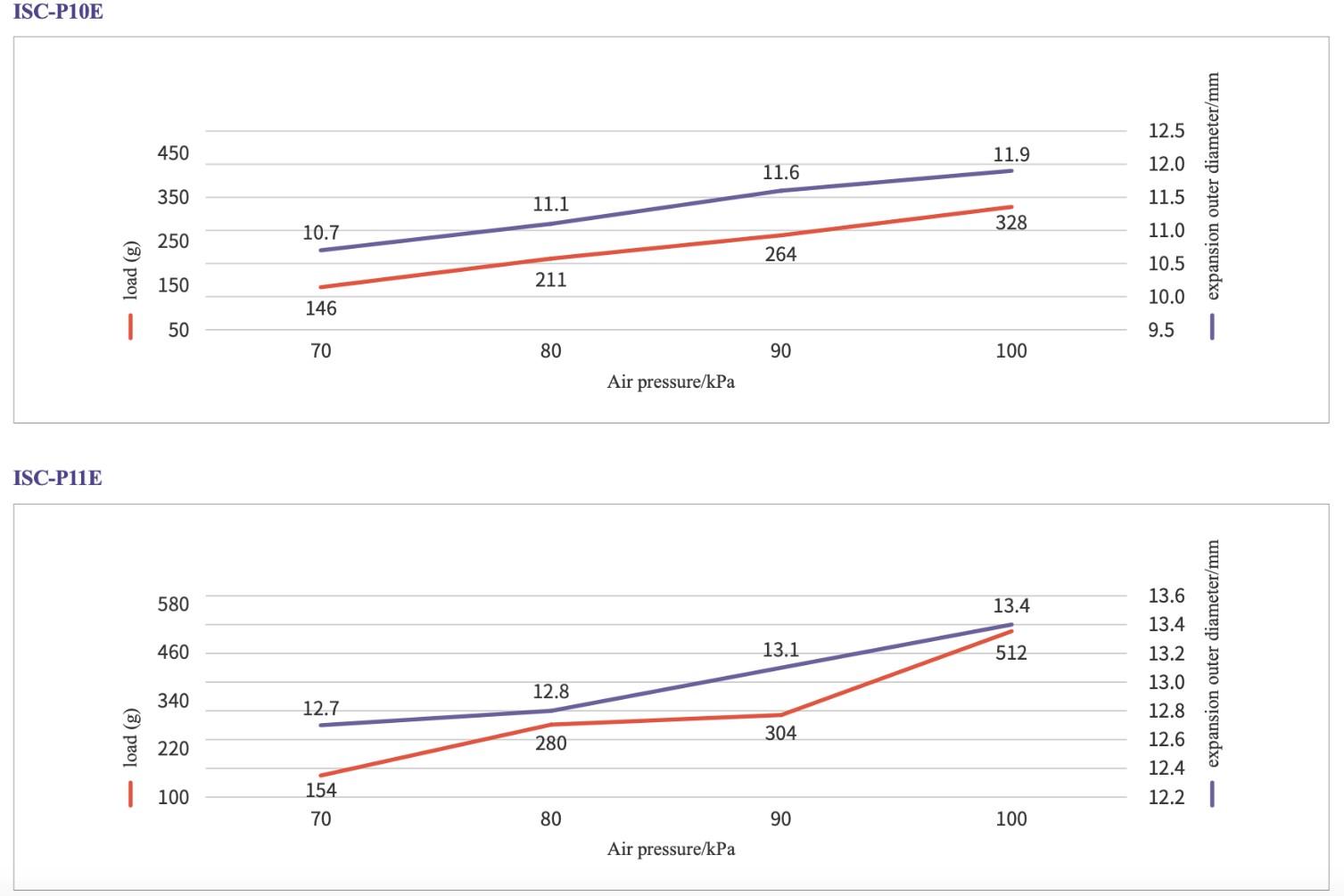
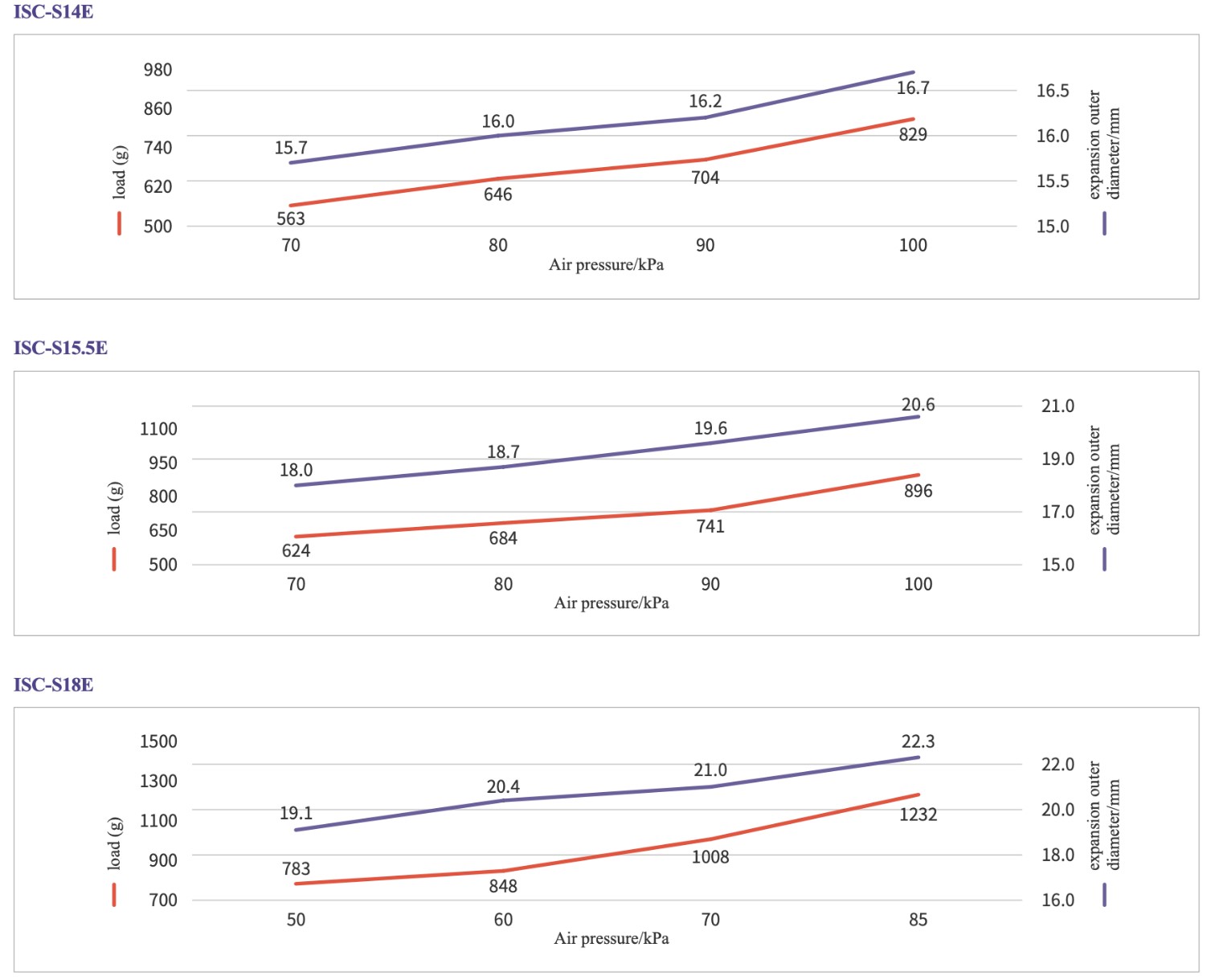
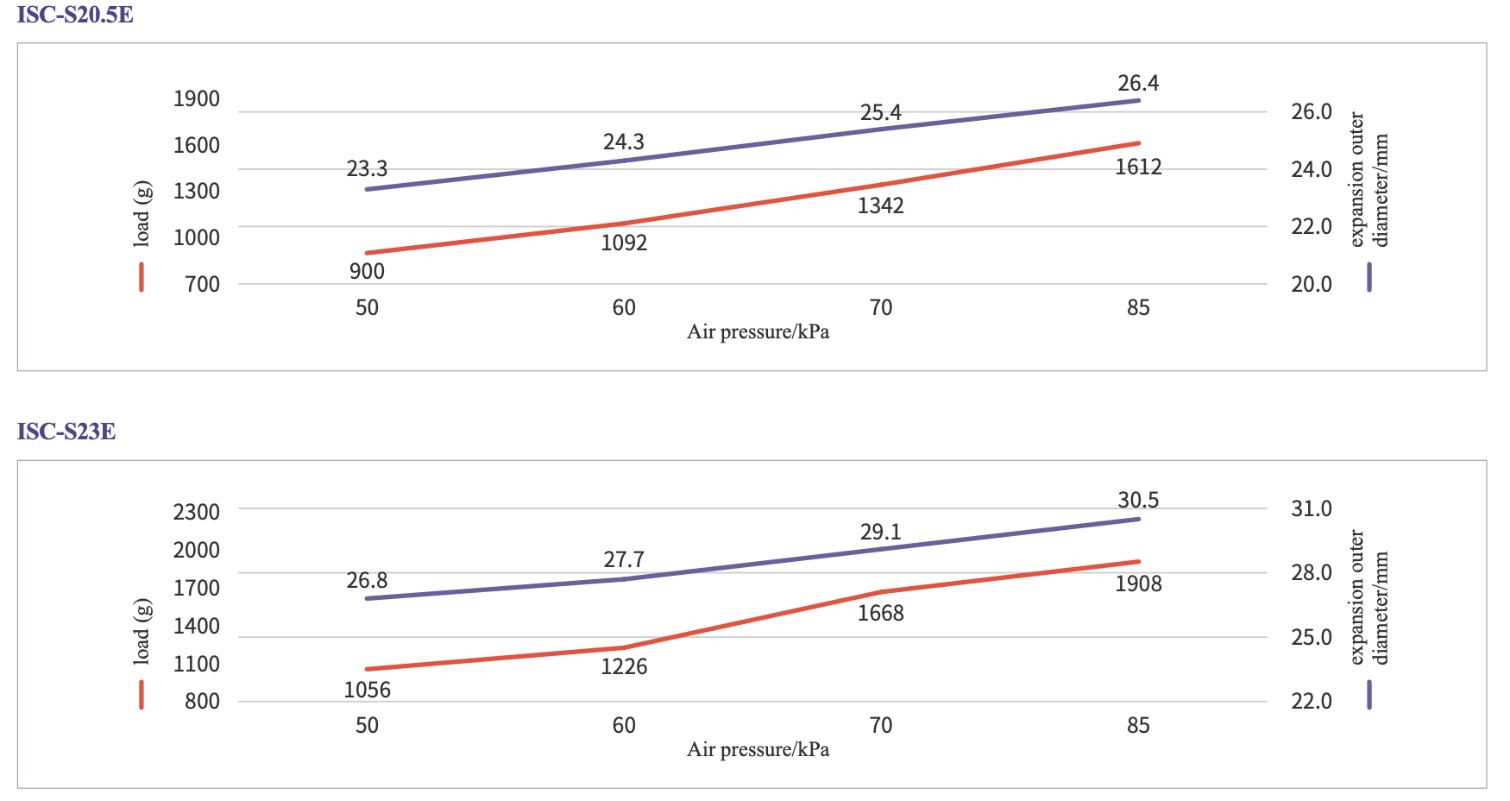
Erweiterter Außendurchmesser
| Modell | Betriebsdruckbereich /kPa | Maximaler Ausdehnungs-Außendurchmesser/mm | Maximale Last/g | Gewicht der Vorrichtung/g | Modell eines Metallstabs | Abmessung der Befestigungsbohrung/mm |
| ISC-SC6-P4.5E | 0-120 | 5.2 | 70 | 36 | VFNT 1421-G18 | 14,5 |
| ISC-SC6-P5E | 0-120 | 6.1 | 110 | 36 | VFNT 1421-G18 | 14,5 |
| ISC-SC6-P6E | 0-100 | 7.1 | 98 | 36 | VFNT 1421-G18 | 14,5 |
| ISC-SC6-P7E | 0-100 | 8,5 | 188 | 36 | VFNT 1421-G18 | 14,5 |
| ISC-SC6-P8E | 0-100 | 9.4 | 213 | 36 | VFNT 1421-G18 | 14,5 |
| ISC-SC6-P9E | 0-100 | 10.6 | 234 | 37 | VFNT 1421-G18 | 14,5 |
| ISC-SC6-P10E | 0-100 | 11.9 | 328 | 37 | VFNT 1421-G18 | 14,5 |
| ISC-SC6-P11E | 0-100 | 13.4 | 512 | 38 | VFNT 1421-G18 | 14,5 |
| ISC-SC6-S14E | 0-100 | 16.7 | 829 | 42 | VFNT 1421-G18 | 14,5 |
| ISC-SC6-S15.5E | 0-100 | 20.6 | 896 | 42 | VFNT 1421-G18 | 14,5 |
| ISC-SC6-S18E | 0-85 | 22.3 | 1232 | 47 | VFNT 1421-G18 | 14,5 |
| ISC-SC6-S20.5E | 0-85 | 26.4 | 1612 | 49 | VFNT 1421-G18 | 14,5 |
| ISC-SC6-S23E | 0-85 | 30,5 | 1908 | 51 | VFNT 1421-G18 | 14,5 |
* Bei der P-Serie beträgt die maximale Belastung des Prüfobjekts den Modellaußendurchmesser + 0,3 mm; bei der S-Serie beträgt die maximale Belastung des Prüfobjekts den Modellaußendurchmesser + 1 mm; Die Belastungsprüfung wird mit professionellen Instrumenten durchgeführt.
Unser Unternehmen







