HITBOT ELEKTRISCHE GREIFERSERIE – Z-EFG-26 Parallel-Elektrogreifer



Hauptkategorie
Industrieroboterarm / Kollaborativer Roboterarm / Elektrischer Greifer / Intelligenter Aktor / Automatisierungslösungen
Anwendung
Die Roboter-Greifer der SCIC Z-EFG-Serie zeichnen sich durch ihre kompakte Bauweise und ein integriertes Servosystem aus, das eine präzise Steuerung von Geschwindigkeit, Position und Spannkraft ermöglicht. Mit dem innovativen Greifsystem von SCIC für Automatisierungslösungen eröffnen sich Ihnen völlig neue Möglichkeiten zur Automatisierung von Aufgaben, die Sie bisher für unmöglich gehalten haben.

Besonderheit
•Greifer-Fallerkennung, Flächenausgabefunktion
Kraft, Position und Geschwindigkeit lassen sich präzise über Modbus steuern.
•Lange Lebensdauer: zig Millionen Zyklen, übertrifft damit Luftkrallen
• Eingebauter Controller: geringer Platzbedarf, einfache Integration
•Steuerungsmodus: 485 (Modbus RTU), E/A
Die Klemmkraft und die Geschwindigkeit können präzise über Modbus gesteuert werden.
Mehrfache Anwendung
Es verfügt über eine Fallerkennung und einen Bezirksausgang.
Genau bis zur Kontrolle
Die Spannkraft, der Bohrer und die Drehzahl können über Modbus gesteuert werden.
Lange Lebensdauer
Zehn Millionen Zyklen, über Luftgreifer
Eingebauter Controller
Platzsparend, leicht zu integrieren.
Reagiert schnell
Die kürzeste Zeit eines einzelnen Hubs beträgt nur 0,25 Sekunden.
Weiche Klemmung
Es kann zerbrechliche Gegenstände wie Eier, Glasbecher usw. einklemmen.




Spezifikationsparameter
Der Z-EFG-26 ist ein elektrischer 2-Finger-Parallelgreifer, klein in der Größe, aber leistungsstark beim Greifen vieler weicher Objekte wie Eier, Rohre, elektronische Bauteile usw.
● Der elektrische Greifer Z-EFG-26 verfügt über eine eingebaute Steuerung.
●Hub und Greifkraft sind einstellbar.
●Die Anschlüsse können ausgetauscht werden, um verschiedenen Anforderungen gerecht zu werden.
●Zerbrechliche und verformbare Gegenstände wie Eier, Reagenzgläser, Ringe usw. lassen sich problemlos aufheben.
●Geeignet für Szenen ohne Luftquellen (wie Labore und Krankenhäuser).
| Modellnr. Z-EFG-26 | Parameter |
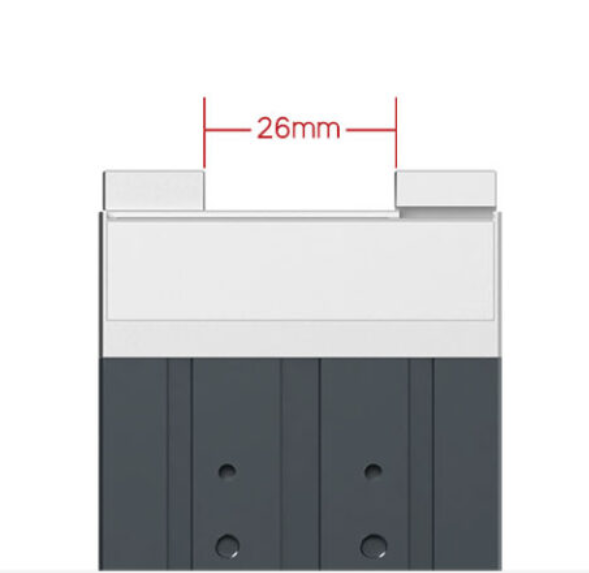
| Gesamt Schlaganfall | 26 mm |
| Greifkraft | 6~15N |
| Wiederholbarkeit | ±0,02 mm |
| Empfohlenes Griffgewicht | Max. 0,3 kg |
| Übertragung Modus | Zahnstange + Kreuzrollenführung |
| Schmierung beweglicher Bauteile | Alle sechs Monate oder 1 Million Bewegungen/Zeit |
| Einweg-Schlagbewegungszeit | 0,25 s |
| Betriebstemperaturbereich | 5-55℃ |
| Betriebsfeuchtigkeitsbereich | RH35-80(Kein Frost) |
| Bewegungsmodus | Zwei Finger bewegen sich horizontal |
| Schlaganfallkontrolle | Einstellbar |
| Einstellung der Klemmkraft | Einstellbar |
| Gewicht | 0,45 kg |
| Abmessungen(L*B*H) | 55*26*97mm |
| Controller-Platzierung | Eingebaut |
| Leistung | 10 W |
| Motortyp | bürstenloser Gleichstrom |
| Spitzenstrom | 1A |
| Nennspannung | 24 V |
| Standby-Strom | 0,4A |
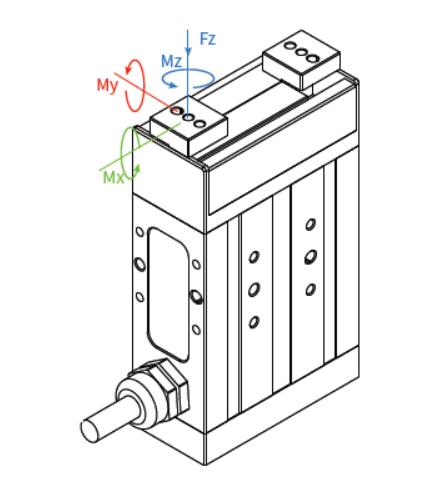
| Zulässige statische Last in vertikaler Richtung | |
| Fz: | 250N |
| Zulässiges Drehmoment | |
| Mx: | 2,4 Nm |
| Mein: | 2,6 Nm |
| Mz: | 2 Nm |
Präzisionskraftregelung, Genauigkeit der Wiederholbarkeit

Der elektrische Greifer verfügt über eine spezielle Getriebekonstruktion und Antriebsberechnung zur Kompensation, sein Gesamthub beträgt 26 mm, die Klemmkraft 6-15 N, Hub und Klemmkraft sind einstellbar und seine Wiederholgenauigkeit beträgt ±0,02 mm.
Schnelle Reaktion, höhere Stabilität

Die kürzeste Zeit für einen einzelnen Hub beträgt nur 0,25 Sekunden und erfüllt damit die Anforderungen an ein schnelles und stabiles Spannen in der Produktionslinie.
Kleine Größe, einfach zu integrieren

Die Größe des Z-EFG-26 beträgt L55*B26*H97mm, seine Struktur ist kompakt, es unterstützt mehr als fünf flexible Installationsmodi, es verfügt über einen eingebauten Controller, benötigt wenig Platz und kann problemlos viele Aufgaben mit unterschiedlichen Spannanforderungen bewältigen.

Integrierte Antriebs- und Steuerungs-Soft-Clamping-Funktion

Das hintere Ende des elektrischen Greifers lässt sich leicht austauschen, sein Klemmgewicht beträgt 300 g. Kunden können das hintere Ende des Greifers speziell an ihre eigenen Klemmobjekte anpassen, damit der elektrische Greifer die Klemmaufgaben bestmöglich erfüllen kann.
Mehrere Steuermodi, einfache Bedienung

Der Greifer Z-EFG-26 ist einfach aufgebaut und verfügt über zahlreiche Steuerungsmodi: 485 (Modbus RTU), Impuls, E/A. Er ist mit SPS-Hauptsteuerungssystemen kompatibel.

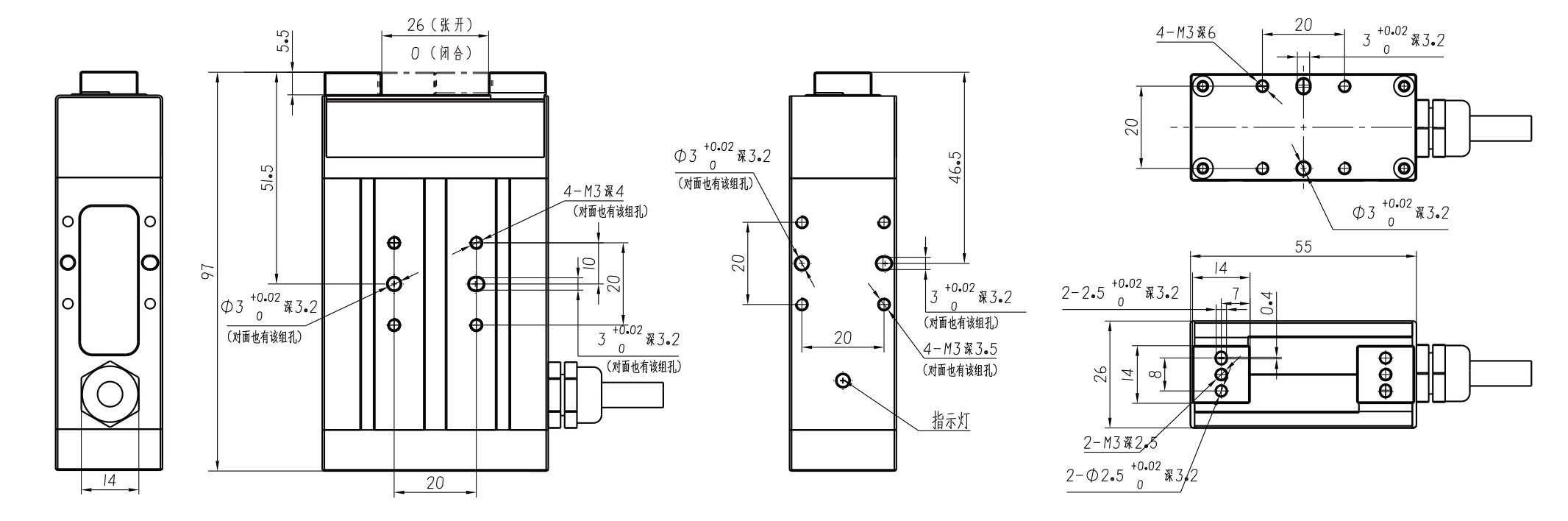
Maßinstallationsdiagramm
Unser Unternehmen







