HITBOT ELEKTRISCHE GREIFERSERIE – Z-EFG-C50 Kollaborativer elektrischer Greifer




Hauptkategorie
Industrieroboterarm / Kollaborativer Roboterarm / Elektrischer Greifer / Intelligenter Aktor / Automatisierungslösungen
Anwendung
Die Roboter-Greifer der SCIC Z-EFG-Serie zeichnen sich durch ihre kompakte Bauweise und ein integriertes Servosystem aus, das eine präzise Steuerung von Geschwindigkeit, Position und Spannkraft ermöglicht. Mit dem innovativen Greifsystem von SCIC für Automatisierungslösungen eröffnen sich Ihnen völlig neue Möglichkeiten zur Automatisierung von Aufgaben, die Sie bisher für unmöglich gehalten haben.

Besonderheit

•Greifer-Fallerkennung, Flächenausgabefunktion
Kraft, Position und Geschwindigkeit lassen sich präzise über Modbus steuern.
·Lange Lebensdauer: zig Millionen Zyklen, übertrifft damit die von Luftkrallen
• Eingebauter Controller: geringer Platzbedarf, einfache Integration
·Steuermodus: 485 (Modbus RTU), E/A
Hub 50 mm, Spannkraft 140 N, kompatibel mit 6-Achs-Roboterarm.
Hochfrequenz
Die kürzeste Hubzeit beträgt 0,5 Sekunden.
Hohe Präzision
Die Wiederholgenauigkeit beträgt ±0,03 mm.
Hohe Nutzlast
Empfohlene Klemmkraft ≤2 kg
Plug-and-Play
Elektrischer Greifer speziell für 6-Achs-Roboterarm
Heck veränderbar
Sein Schwanz ist veränderbar und eignet sich für verschiedene Anforderungen.
Weiche Klemmkraft
Es kann zerbrechliche und deformierte Objekte einklemmen.

● Förderung einer Revolution beim Ersatz pneumatischer Greifer durch elektrische Greifer, erster elektrischer Greifer mit integriertem Servosystem in China.
● Perfekter Ersatz für Luftkompressor + Filter + Magnetventil + Drosselventil + pneumatischen Greifer
● Mehrere Zyklen Lebensdauer, entsprechend der traditionellen japanischen Zylinderbauweise



Spezifikationsparameter
| Modellnr. Z-EFG-C50 | Parameter |
| Gesamtschlag | 50 mm verstellbar |
| Greifkraft | 40-140 N einstellbar |
| Wiederholbarkeit | ±0,03 mm |
| Empfohlenes Griffgewicht | ≤2 kg |
| Übertragungsmodus | Zahnstange + Kugelgelenk |
| Schmierung beweglicher Bauteile | Alle sechs Monate oder 1 Million Bewegungen/Zeit |
| Einweg-Schlagbewegungszeit | 0,5s |
| Bewegungsmodus | Zwei Finger bewegen sich horizontal |
| Gewicht | 1 kg |
| Abmessungen (L*B*H) | 72 x 72 x 143 mm |
| Betriebsspannung | 24 V ± 10 % |
| Bemessungsstrom | 0,8A |
| Spitzenstrom | 2A |
| Leistung | 20 W |
| Schutzklasse | IP20 |
| Motortyp | bürstenloser Gleichstrom |
| Betriebstemperaturbereich | 5-55℃ |
| Betriebsfeuchtigkeitsbereich | RH35-80 (Kein Frost) |

| Zulässige statische Last in vertikaler Richtung | |
| Fz: | 300N |
| Zulässiges Drehmoment | |
| Mx: | 7 Nm |
| Mein: | 7 Nm |
| Mz: | 7 Nm |
Integriertes Fahren und Steuern
Der elektrische Greifer Z-EFG-C50 verfügt über ein integriertes Servosystem, sein Gesamthub beträgt 50 mm, die Klemmkraft 40-140 N, Hub und Klemmkraft sind einstellbar und seine Wiederholgenauigkeit beträgt ±0,03 mm.

Kompatibel mit Sechs-Achs-Roboterarm

Der elektrische Greifer ist mit einem 6-Achs-Roboterarm kompatibel und ermöglicht so ein einfaches Plug-and-Play-System. Seine kürzeste Hubzeit beträgt lediglich 0,5 Sekunden, wodurch die Anforderungen an eine stabile Produktionslinie erfüllt werden können.
Kleine Größe, flexibel zu installieren

Der Z-EFG-C50 verwendet das Übertragungsprinzip einer Zahnstange mit Kugelgelenkführung. Die Produktabmessungen betragen L72*B72*H143mm. Er lässt sich flexibel auch bei beengten Platzverhältnissen einsetzen.


Schnelle Reaktion, Genauigkeit bei der Kraftsteuerung

Die kürzeste Hubzeit beträgt nur 0,5 Sekunden, wodurch schnelles Spannen problemlos möglich ist. Die Endstücke können jederzeit ausgetauscht werden, sodass Kunden die Endstücke nach Bedarf anpassen können.
Mehrere Steuermodi, einfache Bedienung

Die Konfiguration des Z-EFG-C50 ist einfach, es verfügt über zahlreiche Steuermodi, darunter 485 (Modbus RTU), Pulse, I/O, und es ist mit dem SPS-Hauptsteuerungssystem kompatibel.

Lastschwerpunktversatz
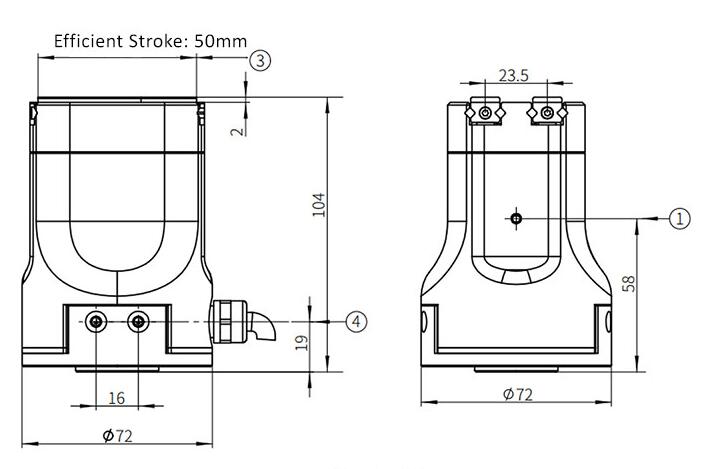
1. LED-Anzeige
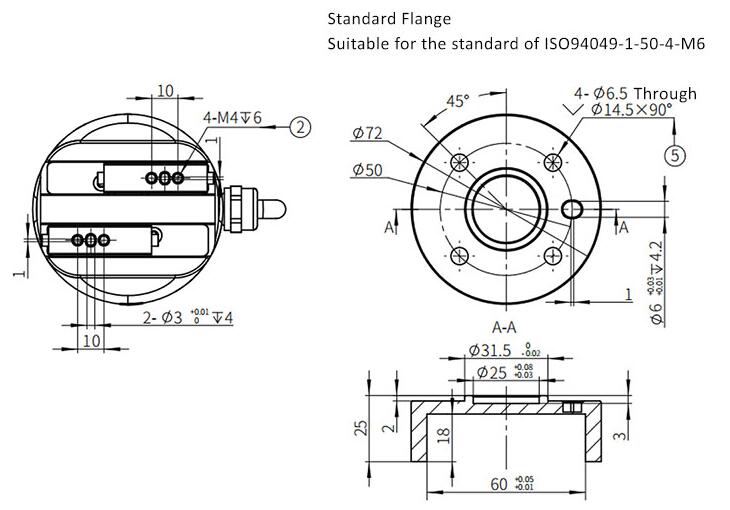
2. Montageort: 4 M4-Schrauben verwenden
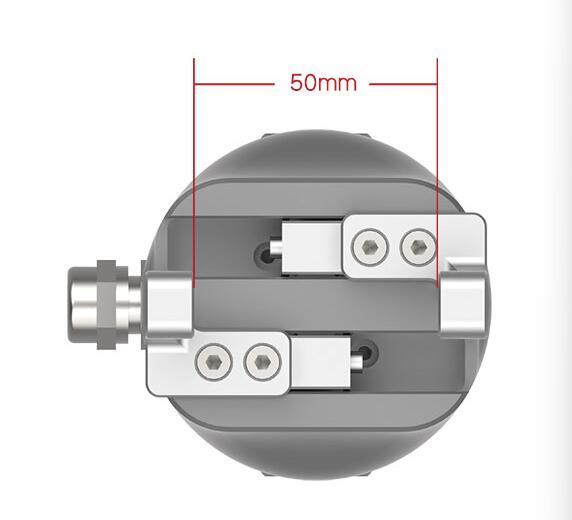
3. Der Hub des elektrischen Greifers beträgt 50 mm.
4. Mutternauslass
5. Am Installationsort mit 4 M6-Schrauben am Anschlussflansch des kollaborativen Roboterarms befestigen.
Unser Unternehmen







