HITBOT ELEKTRISCHE GREIFERSERIE – Z-EFG-20 Parallel-Elektrogreifer


Hauptkategorie
Industrieroboterarm / Kollaborativer Roboterarm / Elektrischer Greifer / Intelligenter Aktor / Automatisierungslösungen
Anwendung
Die Roboter-Greifer der SCIC Z-EFG-Serie zeichnen sich durch ihre kompakte Bauweise und ein integriertes Servosystem aus, das eine präzise Steuerung von Geschwindigkeit, Position und Spannkraft ermöglicht. Mit dem innovativen Greifsystem von SCIC für Automatisierungslösungen eröffnen sich Ihnen völlig neue Möglichkeiten zur Automatisierung von Aufgaben, die Sie bisher für unmöglich gehalten haben.

Besonderheit

• Eingebauter Controller
•Einstellbarer Hub und einstellbare Greifkraft
Das Ende kann ausgetauscht werden, um es an verschiedene Bedürfnisse anzupassen.
•Zerbrechliche und verformbare Gegenstände wie Eier aufheben,Reagenzgläser, Ringe usw.
•Anwenden für Szenen ohne Luftzufuhr (z. B. Labor, Krankenhaus)
Präzise Steuerung, sicheres Spannen auf engstem Raum, schnelles und stabiles Spannen
Große Klemmkraft
Der Gesamthub beträgt 20 mm, die Klemmkraft 80 N.
Genauigkeit zur Kontrolle
Wiederholgenauigkeit: ±0,02 mm
Lange Lebensdauer
Zehn Millionen Zyklen, jenseits der Leistung eines Luftgreifers
Der Controller ist integriert.
Platzsparend, leicht zu integrieren.
Steuermodus
Pulse, I/O-Controller für optionale
Weiche Klemmung
Es kann zerbrechliche Gegenstände einklemmen.




Spezifikationsparameter
| Modellnr. Z-EFG-20 | Parameter |
| Gesamt Schlaganfall | 20 mm |
| Greifkraft | 30~80N |
| Wiederholbarkeit | ±0,02 mm |
| Empfohlenes Griffgewicht | 0,8 kg |
| Übertragung Modus | Zahnstange + Kreuzrollenführung |
| Schmierung beweglicher Bauteile | Alle sechs Monate oder 1 Million Bewegungen/Zeit |
| Einweg-Schlagbewegungszeit | 0,45 s |
| Betriebstemperaturbereich | 5-55℃ |
| Betriebsfeuchtigkeitsbereich | RH35-80(Kein Frost) |
| Bewegungsmodus | Zwei Finger bewegen sich horizontal |
| Schlaganfallkontrolle | Einstellbar |
| Einstellung der Klemmkraft | Einstellbar |
| Gewicht | 0,458 kg |
| Abmessungen(L*B*H) | 44 x 30 x 124,7 mm |
| Controller-Platzierung | Eingebaut |
| Leistung | 5W |
| Motortyp | bürstenloser Gleichstrom |
| Spitzenstrom | 1A |
| Nennspannung | 24 V |
| Standby-Strom | 0,2A |
| Stoßfest / vibrationsfest | 98 m/s |
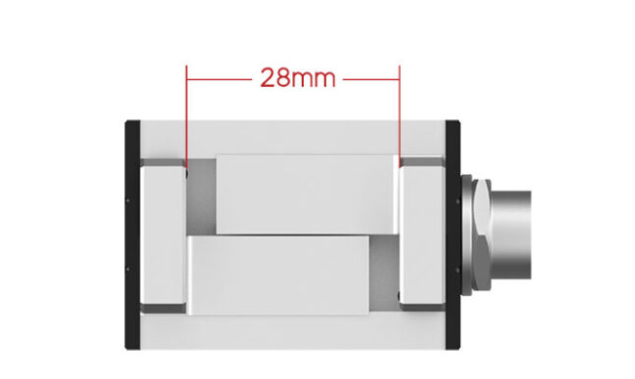
| Motordurchmesser | 28 mm |
* Z-EFG-20 Greifkraft: Die Greifkraft kann durch Hinzufügen eines kontrolliert verformbaren Materials an der Vorderseite der Vorrichtung eingestellt werden, das gemäß der entsprechenden Kurve von Verformung und Kraft ermittelt wird.
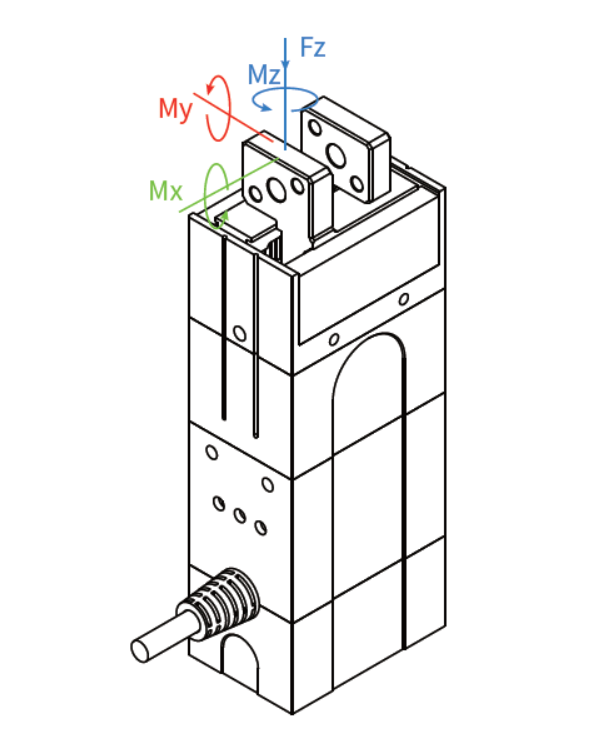
| Zulässige statische Last in vertikaler Richtung | |
| Fz: | 150N |
| Zulässiges Drehmoment | |
| Mx: | 2,1 Nm |
| Mein: | 2,34 Nm |
| Mz: | 2 Nm |
Hohe Spannkraft, präzise Kraftregelung

Der elektrische Greifer verfügt über eine spezielle Getriebekonstruktion und eine Antriebsberechnungskompensation, seine Klemmkraft ist stufenlos von 80 N einstellbar, der Gesamthub beträgt 20 mm und die Wiederholgenauigkeit ±0,02 mm.
Bewegungsmodus und Hub einstellbar
Die Bewegung des elektrischen Greifers entspricht einer parallelen Zweifingerbewegung, seine kürzeste Zeit für einen einzelnen Hub beträgt nur 0,45 Sekunden, das Klemmgewicht ≤0,8 kg, er kann die Anforderungen an ein stabiles Klemmen in Produktionslinien erfüllen.
Kompakte Bauweise, flexibel zu installieren.

Die Z-EFG-20 hat die Abmessungen L40*B30*H124,7mm, ist kompakt gebaut, unterstützt mehr als fünf Installationsmodi, verfügt über einen eingebauten Controller, benötigt wenig Platz und ermöglicht die einfache Durchführung verschiedener Spannaufgaben.


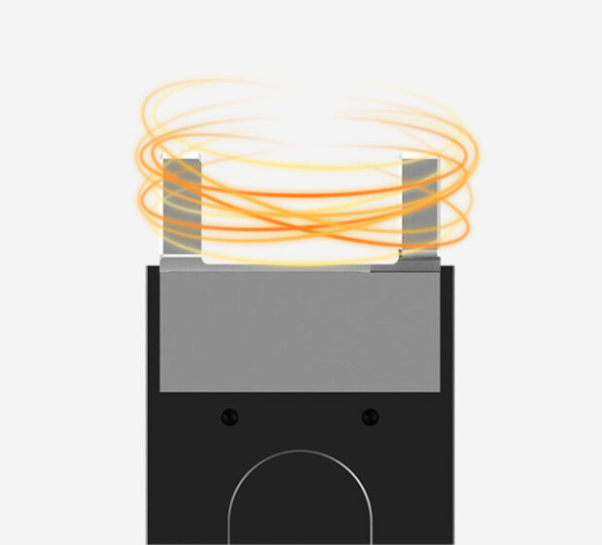
Antrieb und Steuerung integriert, sanfte Klemmung

Das Heck des Z-EFG-20 kann problemlos ausgetauscht werden, Kunden können ihre gewünschten Objekte einspannen, das Heck entsprechend gestalten und den Elektrogreifer so weit wie möglich für die Durchführung von Spannaufgaben einsetzen.
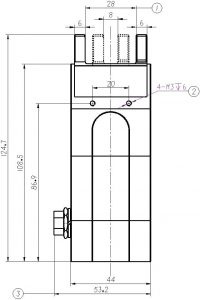
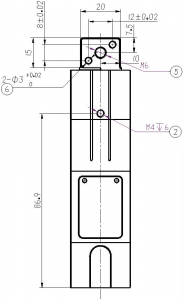
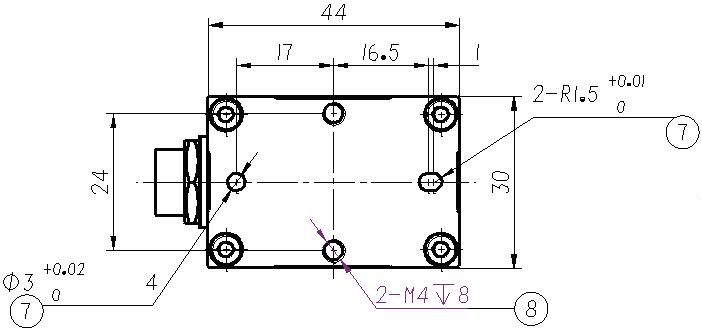
Maßinstallationsdiagramm
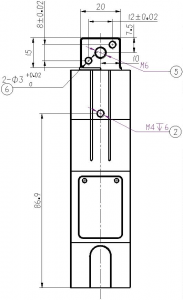
① Bewegungsschlag der Greiffinger
② Seitliche Montageposition (Gewindebohrung)
③ Verdrahtungsposition für Luftfahrtsteckdosen
④ Position der Greiferkraftverstellung (links) und der Kontrollleuchte (rechts)
⑤ Einbauposition des Greifers (Gewindebohrung)
⑥ Einbauposition des Greifers (Stiftloch)
⑦ Untere Montageposition (Stiftloch)
⑧ Untere Montageposition ((Gewindebohrung))
Unser Unternehmen







